Motion detector
Detect motion without polling
 Edit this page
Edit this page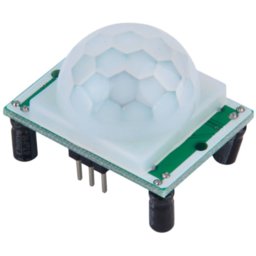
Overview
GPIO pins can be leveraged to detect motion via a PIR (Passive/Pyroelectric InfraRed sensor), similar to reading button presses.
The gpio.PinIn.WaitForEdge() function permits a edge detection without a busy loop.
Learn more
- PIR tutorial on Adafruit that explains the physics behind the sensor
- PIR on Wikipedia
Example
package main
import (
"fmt"
"log"
"periph.io/x/conn/v3/gpio"
"periph.io/x/conn/v3/gpio/gpioreg"
"periph.io/x/host/v3"
)
func main() {
// Load all the drivers:
if _, err := host.Init(); err != nil {
log.Fatal(err)
}
// Lookup a pin by its number:
p, err := gpioreg.ByName("16")
if err != nil {
log.Fatal(err)
}
fmt.Printf("%s: %s\n", p, p.Function())
// Set it as input.
if err = p.In(gpio.PullNoChange, gpio.RisingEdge); err != nil {
log.Fatal(err)
}
// Wait for edges as detected by the hardware.
for {
p.WaitForEdge(-1)
if p.Read() == gpio.High {
fmt.Printf("You moved!\n")
}
}
}
This example uses basically no CPU: the WaitForEdge() leverages the edge detection provided by the kernel, unlike other Go hardware libraries.
Buying
- Adafruit: adafruit.com/?q=motion%20pir
- Aliexpress: aliexpress.com/wholesale?SearchText=hc-sr501
- Amazon: amazon.com/s?field-keywords=hc-sr501
- Pimoroni: shop.pimoroni.com/?q=motion%20pir
- SeeedStudio: seeedstudio.com/s/pir%20motion.html
The periph authors do not endorse any specific seller. These are only provided for your convenience.