periph
 Edit this page
Edit this pageNews
Overview
Periph is a standalone hardware library with limited external dependencies.
Features
- No external dependencies.
- No C dependency, doesn’t use
cgo. - Explicit initialization: know what hardware is detected and what is not.
- Interfaces: GPIO (with edge detection), I²C, SPI, 1-wire.
- Continuously tested via gohci.
- SemVer compatibility guarantee.
Platforms
Linux
Generic linux support for any board

macOS
hack on your laptop

Windows
hack on your laptop

BeagleBone
Series of high quality boards
C.H.I.P.
NextThing Co's board

Jetson Nano Developer Kit
NVIDIA Jetson Nano module and carrier board

ODROID-C1
HardKernel board

Raspberry Pi
running Raspbian Lite
Devices
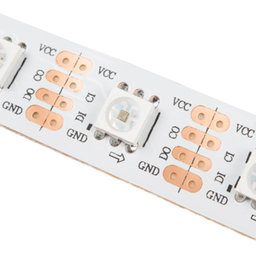
APA102
13 bits LEDs

BMxx80
Family of atmospheric sensors

Button
React to button presses without polling

Buzzer
Annoy your friends with noise

CAP1xxx
Family of capacitive touch sensors

DS18b20
Inexpensive temperature sensor
DS248x
1-wire interface over I²C

Fan
Move air across to cool a embedded components.

FLIR Lepton
InfraRed Thermal Camera

FTDI FT232x
Fast USB multi-protocol connectivity
GPIO
Generic digital input/output support
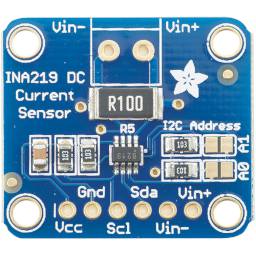
INA219
High side current voltage and power sensor

IR remote
InfraRed remote support

LED
Toggle a LED is the first step

MF-RC522
MIFARE and NTAG frontend
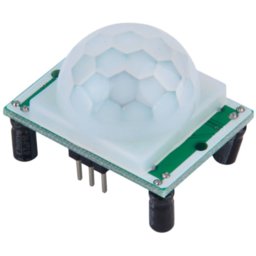
Motion detector
Detect motion without polling
SSD1306
1 bit OLED display controller

TM1637
Segment controller
Tools
periph includes many ready-to-use tools:
go get periph.io/x/cmd/...
# List the host drivers registered and/or initialized:
periph-info
# List the board headers:
headers-list
# List the state of each GPIO:
gpio-list
# Set P1_7/GPIO4 on a Raspberry Pi to high:
gpio-write P1_7 1
Library
periph tries hard to get out of the way when used as a
library.
Here’s the minimal “toggle a LED” example:
package main
import (
"time"
"periph.io/x/conn/v3/gpio"
"periph.io/x/conn/v3/gpio/gpioreg"
"periph.io/x/host/v3"
)
func main() {
host.Init()
p := gpioreg.ByName("11")
t := time.NewTicker(500 * time.Millisecond)
for l := gpio.Low; ; l = !l {
p.Out(l)
<-t.C
}
}
Learn more about GPIOs.

More infos
- Read the source code.
- Contribute to the project.
- Learn about the project philosophy.
Contact
- #periph on gophers.slack.com. Request access at invite.slack.golangbridge.org
- File issues at github.com/google/periph/issues
Authors
periph was initiated with ❤️️ and passion by Marc-Antoine
Ruel. The full list of contributors is in AUTHORS
and CONTRIBUTORS in each repository.
Disclaimer
This is not an official Google product (experimental or otherwise), it is just code that happens to be owned by Google.
This project is not affiliated with the Go project.